この記事は1年以上前に書かれました。
内容が古くなっている可能性がありますのでご注意下さい。
内容が古くなっている可能性がありますのでご注意下さい。
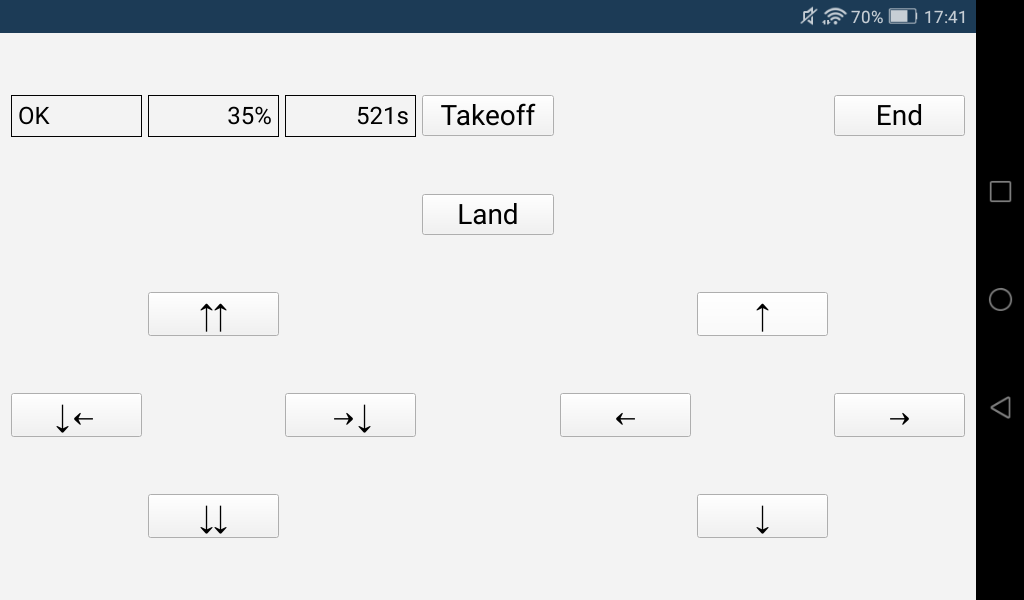
今回は、バッテリーの充電量と飛行時間を定期的に自動で取得してラベルに表示するようにします。下の画像で、一番左上の「OK」は通常のコマンドに対するレスポンス、その右の「35%」は充電量、「521s」は飛行時間です。
前回作成したプログラムを実行したところ、「battery?」に対しては数字のみが返され、「time?」へのレスポンスでは数字の後に「s」が付くことが分かりましたので、この仕様を利用します。ただし、この仕様はSDKドキュメントの記載とは異なるので、将来的には変更される可能性もあります。
今回作成したプログラムは以下の通りです。GitHubでMITライセンスで公開しています。
#!/usr/bin/python3
# -*- coding: utf-8 -*-
import threading
import socket
import time
import sys
from PyQt5.QtCore import *
from PyQt5.QtWidgets import *
class TelloController1(QWidget):
def __init__(self):
QWidget.__init__(self)
self.initConnection()
self.initUI()
# 最初にcommandコマンドを送信
try:
sent = self.sock.sendto('command'.encode(encoding="utf-8"), self.tello)
except:
pass
# 速度を遅めに設定
try:
sent = self.sock.sendto('speed 50'.encode(encoding="utf-8"), self.tello)
except:
pass
# 問い合わせスレッド起動
askThread = threading.Thread(target=self.askTello)
askThread.setDaemon(True)
askThread.start()
# 通信の設定
def initConnection(self):
host = ''
port = 9000
locaddr = (host,port)
self.tello = ('192.168.10.1', 8889)
self.sock = socket.socket(socket.AF_INET, socket.SOCK_DGRAM)
self.sock.bind(locaddr)
# 受信スレッド起動
recvThread = threading.Thread(target=self.recvSocket)
recvThread.setDaemon(True)
recvThread.start()
# UIの作成
def initUI(self):
# 情報表示用ラベル
self.label = QLabel('')
self.label.setFrameStyle(QFrame.Box | QFrame.Plain)
self.batteryLabel = QLabel('100%')
self.batteryLabel.setFrameStyle(QFrame.Box | QFrame.Plain)
self.batteryLabel.setAlignment(Qt.AlignBottom | Qt.AlignRight)
self.timeLabel = QLabel('0s')
self.timeLabel.setFrameStyle(QFrame.Box | QFrame.Plain)
self.timeLabel.setAlignment(Qt.AlignBottom | Qt.AlignRight)
# 終了ボタン
endBtn = QPushButton("End")
endBtn.clicked.connect(self.endBtnClicked)
# 離着陸ボタン
takeoffBtn = QPushButton("Takeoff")
takeoffBtn.clicked.connect(self.takeoffBtnClicked)
landBtn = QPushButton("Land")
landBtn.clicked.connect(self.landBtnClicked)
# 上昇下降回転ボタン
upBtn = QPushButton("↑↑")
upBtn.clicked.connect(self.upBtnClicked)
downBtn = QPushButton("↓↓")
downBtn.clicked.connect(self.downBtnClicked)
cwBtn = QPushButton("→↓")
cwBtn.clicked.connect(self.cwBtnClicked)
ccwBtn = QPushButton("↓←")
ccwBtn.clicked.connect(self.ccwBtnClicked)
# 前後左右ボタン
forwardBtn = QPushButton("↑")
forwardBtn.clicked.connect(self.forwardBtnClicked)
backBtn = QPushButton("↓")
backBtn.clicked.connect(self.backBtnClicked)
rightBtn = QPushButton("→")
rightBtn.clicked.connect(self.rightBtnClicked)
leftBtn = QPushButton("←")
leftBtn.clicked.connect(self.leftBtnClicked)
# UIのレイアウト
layout = QGridLayout()
layout.addWidget(self.label,0,0)
layout.addWidget(self.batteryLabel,0,1)
layout.addWidget(self.timeLabel,0,2)
layout.addWidget(endBtn,0,6)
layout.addWidget(takeoffBtn,0,3)
layout.addWidget(landBtn,1,3)
layout.addWidget(upBtn,2,1)
layout.addWidget(downBtn,4,1)
layout.addWidget(cwBtn,3,2)
layout.addWidget(ccwBtn,3,0)
layout.addWidget(forwardBtn,2,5)
layout.addWidget(backBtn,4,5)
layout.addWidget(rightBtn,3,6)
layout.addWidget(leftBtn,3,4)
self.setLayout(layout)
# 終了処理
def endBtnClicked(self):
sys.exit()
# 各種コマンド送信
def takeoffBtnClicked(self):
try:
sent = self.sock.sendto('takeoff'.encode(encoding="utf-8"), self.tello)
except:
pass
def landBtnClicked(self):
try:
sent = self.sock.sendto('land'.encode(encoding="utf-8"), self.tello)
except:
pass
def upBtnClicked(self):
try:
sent = self.sock.sendto('up 20'.encode(encoding="utf-8"), self.tello)
except:
pass
def downBtnClicked(self):
try:
sent = self.sock.sendto('down 20'.encode(encoding="utf-8"), self.tello)
except:
pass
def cwBtnClicked(self):
try:
sent = self.sock.sendto('cw 45'.encode(encoding="utf-8"), self.tello)
except:
pass
def ccwBtnClicked(self):
try:
sent = self.sock.sendto('ccw 45'.encode(encoding="utf-8"), self.tello)
except:
pass
def forwardBtnClicked(self):
try:
sent = self.sock.sendto('forward 20'.encode(encoding="utf-8"), self.tello)
except:
pass
def backBtnClicked(self):
try:
sent = self.sock.sendto('back 20'.encode(encoding="utf-8"), self.tello)
except:
pass
def rightBtnClicked(self):
try:
sent = self.sock.sendto('right 20'.encode(encoding="utf-8"), self.tello)
except:
pass
def leftBtnClicked(self):
try:
sent = self.sock.sendto('left 20'.encode(encoding="utf-8"), self.tello)
except:
pass
# Telloからのレスポンス受信
def recvSocket(self):
while True:
try:
data, server = self.sock.recvfrom(1518)
resp = data.decode(encoding="utf-8").strip()
if resp.isdecimal(): # 数字だけなら充電量
self.batteryLabel.setText(resp + "%")
elif resp[-1:] == "s": # 最後の文字がsなら飛行時間
self.timeLabel.setText(resp)
elif resp == "OK": # OKは黒
self.label.setStyleSheet("color:black;")
self.label.setText(resp)
else: # それ以外は赤
self.label.setStyleSheet("color:red;")
self.label.setText(resp)
except:
pass
# 問い合わせ
def askTello(self):
while True:
try:
sent = self.sock.sendto('battery?'.encode(encoding="utf-8"), self.tello)
except:
pass
time.sleep(0.5)
try:
sent = self.sock.sendto('time?'.encode(encoding="utf-8"), self.tello)
except:
pass
time.sleep(0.5)
if __name__ == '__main__':
app = QApplication(sys.argv)
window = TelloController1()
window.show()
sys.exit(app.exec_())
充電量と飛行時間を取得するコマンドはスレッドの中で0.5秒毎に送信します。
def askTello(self):
while True:
try:
sent = self.sock.sendto('battery?'.encode(encoding="utf-8"), self.tello)
except:
pass
time.sleep(0.5)
try:
sent = self.sock.sendto('time?'.encode(encoding="utf-8"), self.tello)
except:
pass
time.sleep(0.5)
Telloからレスポンスを受信した際に、数字のみなら充電量、最後の文字が「s」なら飛行時間という判定をし、表示するラベルを選択しています。それ以外の場合には、「OK」かどうかによってラベルの色を変更しています。
if resp.isdecimal(): # 数字だけなら充電量
self.batteryLabel.setText(resp + "%")
elif resp[-1:] == "s": # 最後の文字がsなら飛行時間
self.timeLabel.setText(resp)
elif resp == "OK": # OKは黒
self.label.setStyleSheet("color:black;")
self.label.setText(resp)
else: # それ以外は赤
self.label.setStyleSheet("color:red;")
self.label.setText(resp)